Miniature Locust-Inspired Stable Jumping Robot
We developed a miniature locust-inspired jumping robot, which has a body length of 10 cm and weight of 60 g. The robot achieved a jump height of 3 BLs (30 cm) and a jump distance of 7 BLs (70 cm).

We developed a miniature locust-inspired jumping robot, which has a body length of 10 cm and weight of 60 g. The robot achieved a jump height of 3 BLs (30 cm) and a jump distance of 7 BLs (70 cm).
A prototype of the jump-gliding robot has been construed, with the size of 20 cm in length, 6.6 cm in width, and 9 cm in height, weighing a total of 97 g.The robot can achieve jump-gliding locomotion from a high platform to the ground with a height difference of 0.5 m, the horizontal displacement between the initial and final states is 2.9 m (14.5 BL).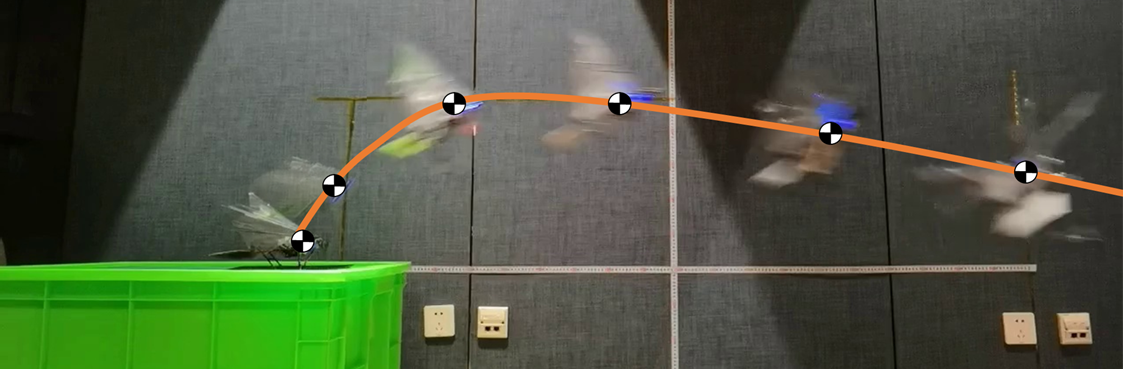
We designed a smaller sized robotic rat than our previous study, which can conqure multiple terrians. This robot can be remote controled by upper computer. The robot was designed with a compact and narrow body (wide: 4.88cm) and smaller weight (160g). The robot can adapt unstructred terrians, including sand, mud, grass, continuous ramp and narrow gap.
We developed a quadruped wheeled-leg mobile robot which has effective barrier crossing performance (150% BL) and high load capacity (2kg), which combines the advantages of wheel and leg motion. 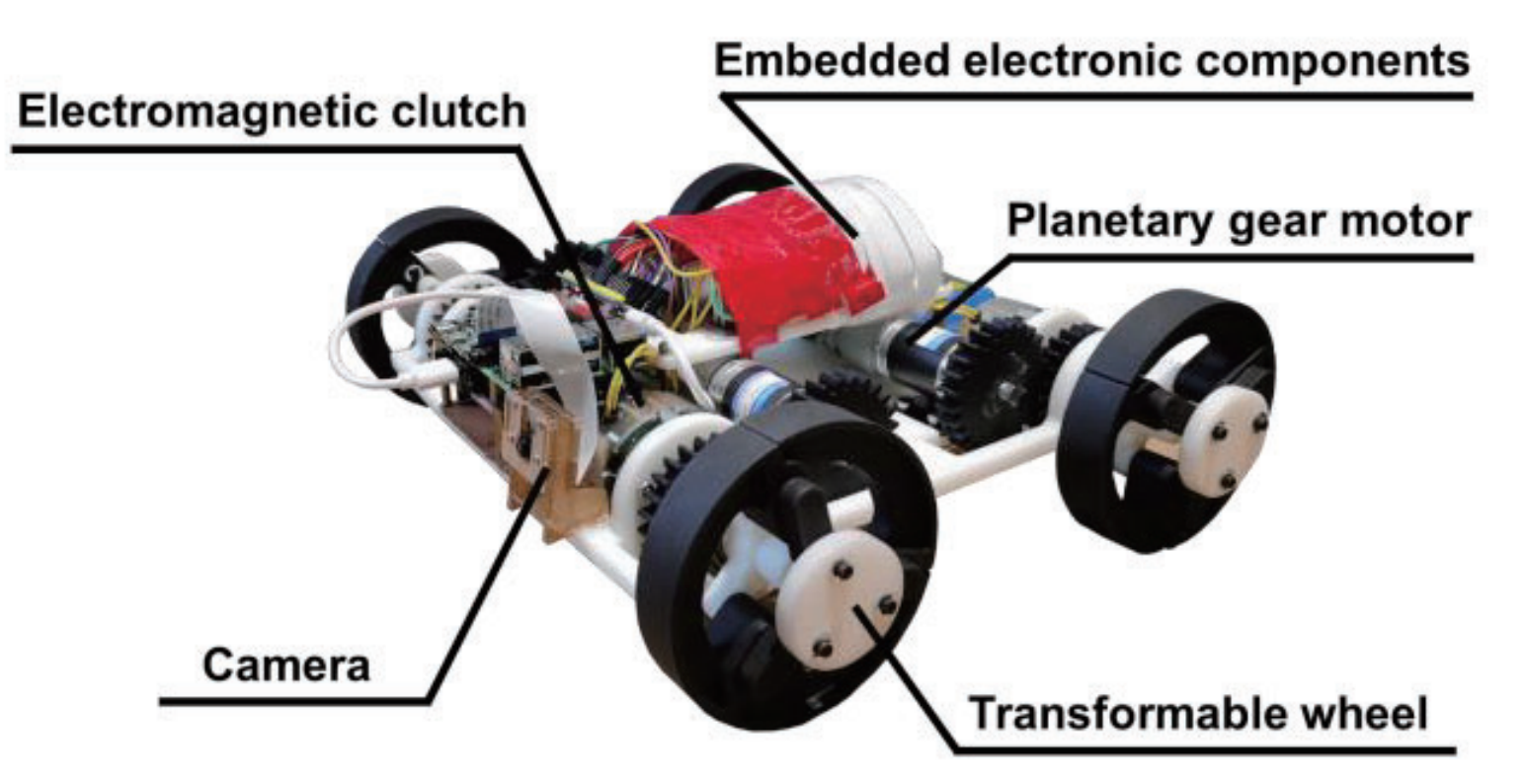
Mechatronical design and real-time image recognition of drones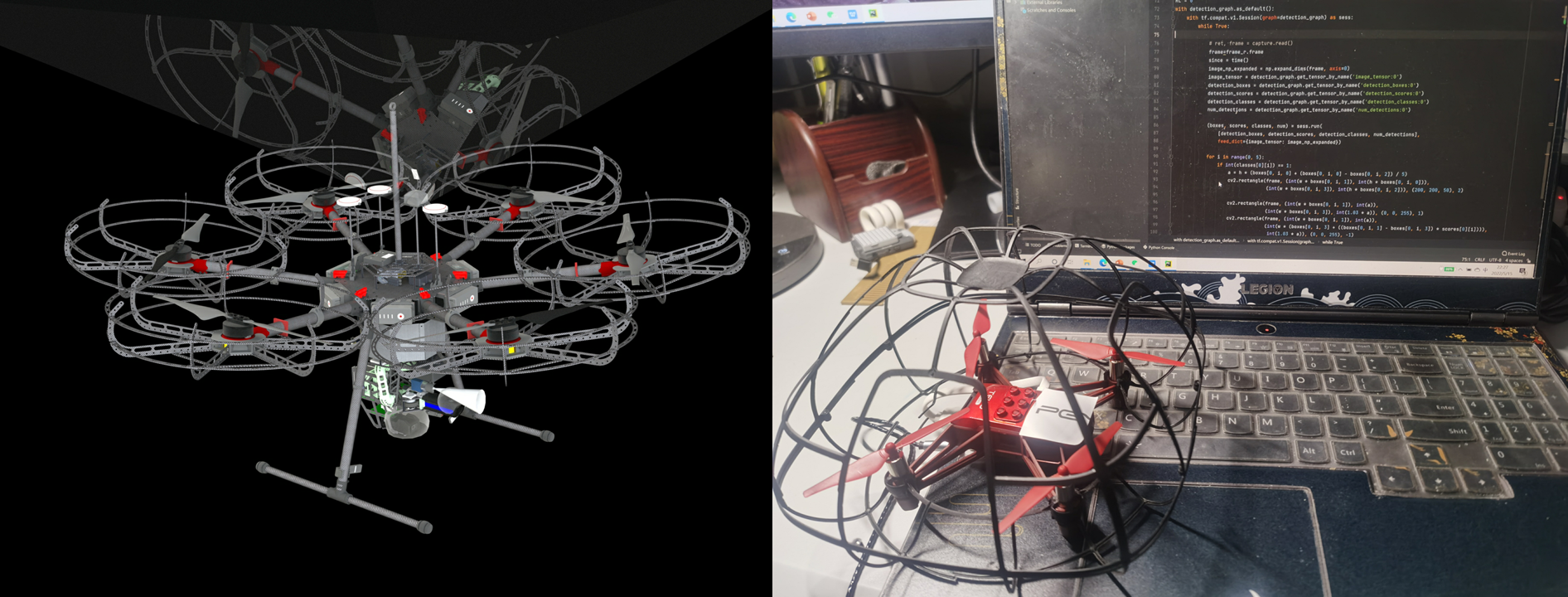
Published in 2022 IEEE International Conference on Cyborg and Bionic Systems (CBS), 2023
Recommended citation: Y. He, C. Sun, X. Quan, Y. Jin, R. Wang and Q. Shi, "QuWheeleg: Quadruped Wheeled-leg Robot Based on Electromagnetic Clutch Pulse Control," 2022 IEEE International Conference on Cyborg and Bionic Systems (CBS), Wuhan, China, 2023, pp. 208-215, doi: 10.1109/CBS55922.2023.10115391.
Published in IEEE Robotics and Automation Letters, 2023
Recommended citation: Y. Xu, Y. Jin et al., "Design and Optimization of a Miniature Locust-Inspired Stable Jumping Robot," in IEEE Robotics and Automation Letters, vol. 8, no. 8, pp. 4673-4680, Aug. 2023, doi: 10.1109/LRA.2023.3287795.
Published in Published in IEEE International Conference on Real-time Computing and Robotics, 2023, 2023
Recommended citation: Y. Si, **Y. Jin**, C. Jing, Z. Yu, T. Fukuda and Q. Shi, "Locust-Inspired Timing Strategy for Wing Deployment in Jump-Fly Robots," 2023 IEEE International Conference on Real-time Computing and Robotics (RCAR), Datong, China, 2023, pp. 44-50, doi: 10.1109/RCAR58764.2023.10250097.
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.