Optimal Design and Implementation for Jump-Gliding Locomotion of a Miniature Locust-Inspired Robot
Optimal Design and Implementation for Jump-Gliding Locomotion of a Miniature Locust-Inspired Robot
- Date: 06/2021
- Advisor: Professor Qing Shi
- Designed and optimized the mechanical structure and the wing deploymet strategy
Outcomes: A conference paper, a patent and multiple awards
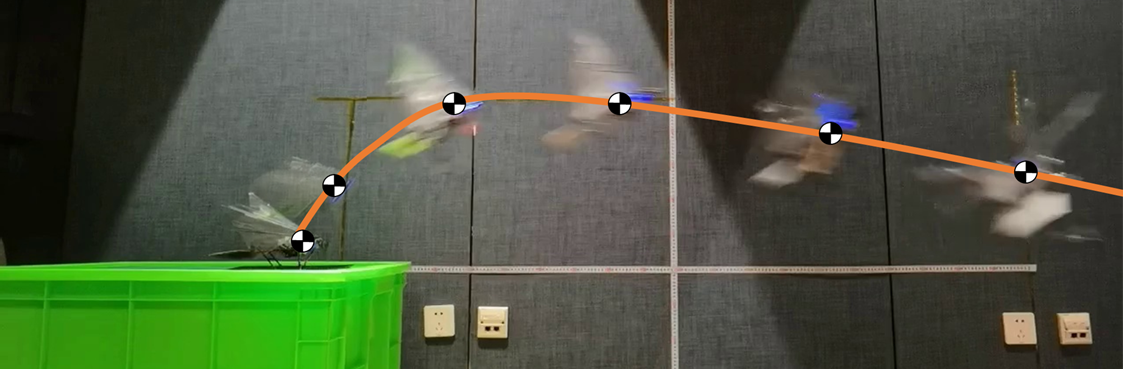
Hybrid locomotion robots, combining various motion modes such as walking, climbing, jumping, and gliding, exhibit a significantly larger range of motion compared to traditional robots with single locomotion modes. They demonstrate excellent maneuverability and adaptability to complex environments. Among these modes, the combination of jumping and gliding (referred to as Jump-gliding), effectively enhances the movement capabilities and energy efficiency of miniature robots. However, existing miniature Jump-gliding robots face challenges such as excessive weight and interference between different locomotion modes. To address these issues, this paper proposes an optimization design and implementation of a locust-inspired miniature robot, aiming to maximize its Jump-gliding capabilities. Drawing inspiration from the muscular and skeletal structure of locust legs, this paper simplified the bionic linkage of the leg mechanism and optimized the self-locking mechanism and leg materials while considering the center of mass, resulting in a lightweight design for the jumping structure of the robot. Additionally, inspired by the wing structure of locusts, we introduce a folding wing bionic configuration to reduce resistance during the jumping phase and increase lift during the gliding phase, achieving a coupled leaping locomotion configuration. Based on the biological locomotion characteristics, we propose three motion phases for the locust-inspired jump-gliding robot: jumping, transition (wing deployment), and gliding. Kinematic and dynamic models are established for each phase. Computational Fluid Dynamics (CFD) analysis is employed to examine the aerodynamic performance of the robot’s wings during jumping and gliding motions, as well as the aerodynamic changes during wing folding in the transition state. This analysis helps determine the necessary aerodynamic parameters for the models. To optimize the Jump-gliding performance, an optimal wing deployment strategy is formulated with the horizontal leaping distance as the objective. An experimental prototype is constructed based on the design specifications, with the robot measuring 20 cm in length, 6.6 cm in width, and 9 cm in height, weighing a total of 97 g. Experimental tests are conducted to evaluate the robot’s jump-gliding locomotion. The results demonstrate that the maximum horizontal displacement for flat-ground jumping is 0.65 m, and the maximum jumping height is 0.3 m. For flat-ground jump-gliding, the maximum horizontal displacement is 2.2 m, and the maximum jumping height is 0.5 m. The horizontal displacement during jump-gliding from a high platform is 2.9 m, with a height difference of 0.5 m between the initial and final states. Compared to flat-ground jumping, flat-ground jump-gliding shows a remarkable improvement of 238% in horizontal displacement and 67% in jumping height.