QuWheeleg: Quadruped Wheeled-leg Robot Based on Electromagnetic Clutch Pulse Control
QuWheeleg: Quadruped Wheeled-leg Robot Based on Electromagnetic Clutch Pulse Control
- Date: 06/2021
- Advisor: Prof. Qingyi Gu
- Mainly responsible for the mechanical design of aerial robots and the overall design of robot systems
- Outcomes: A conference paper
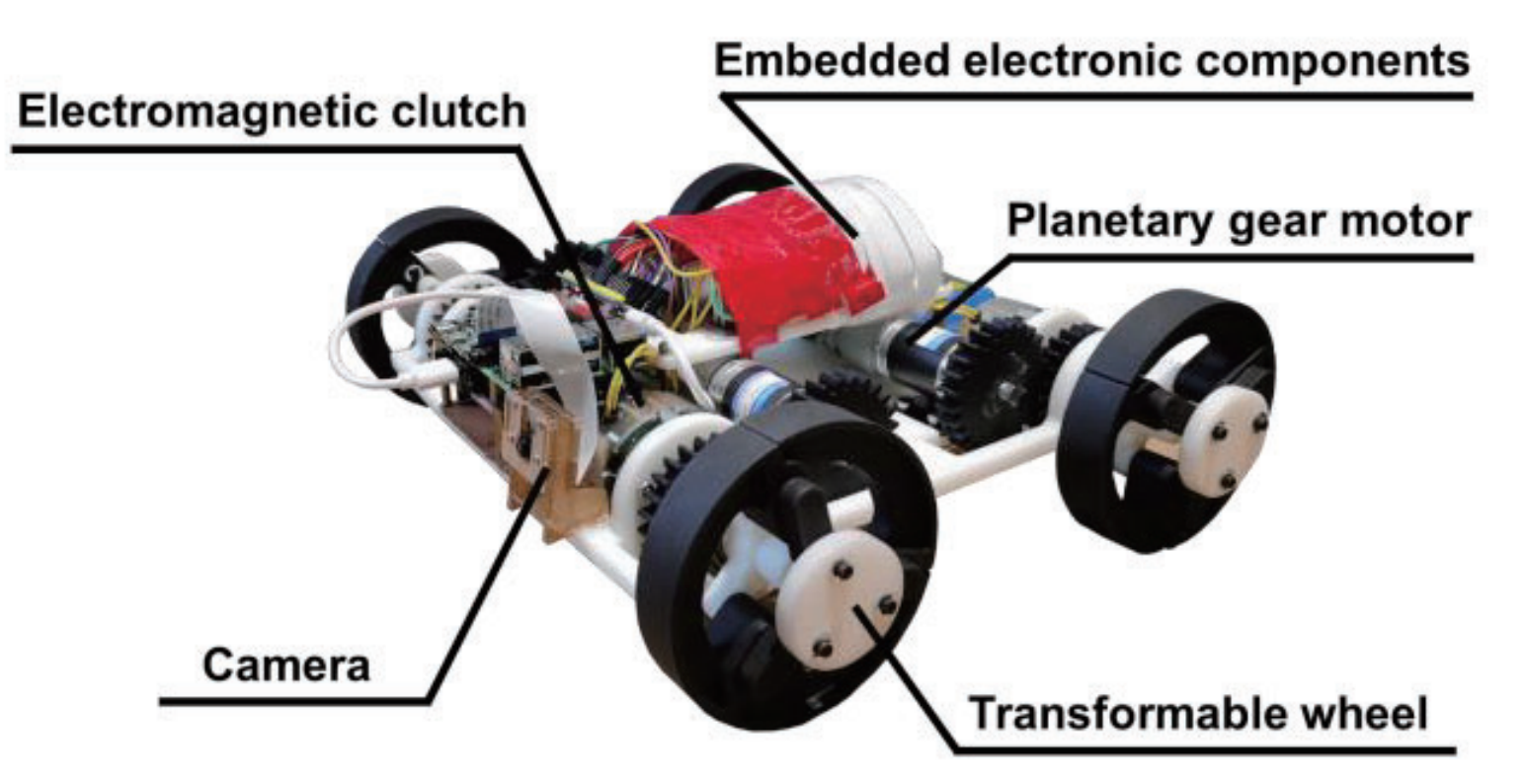
We developed a quadruped wheeled-leg mobile robot. On the basis of the planar four-bar mechanism, an active deformable wheel mechanism is designed, then optimize the deformation ratio based on genetic algorithm. We use an electromagnetic clutch for motion mode switching, which ensures the stability and reliability of robot mode switching without adding extra drive. Furthermore, we propose the electromagnetic clutch high-frequency pulse control method to ensure the continuity of the leg-form motion state. The results obtained through a series of simulations and experimental tests reveal that QuWheeleg has effective barrier crossing performance (150% BL) and high load capacity (2kg), which combines the advantages of wheel and leg motion.